
概要
2014年に行われたARLISSは、今年度で15th周年を迎え、16回目の開催となりました。 ARLISS2014には日本から19チーム、アメリカから4チーム、韓国から2チーム、エジプトから1チーム、コスタリカから1チーム、ペルーから1チーム、の合計28チームが参加しました。 大会は9月7-12日の期間にAeropacの方々の協力のもと、アメリカ合衆国ネバダ州ブラックロック砂漠にて、以下のスケジュールで開催しました。
| 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|
| 日 | 月 | 火 | 水 | 木 | 金 |
| 12:00~14:00 事前打ち合わせ 技術交流会 @Bruno’s |
8:00~ 開会式 打ち上げ @BlackRock |
8:00~ 打ち上げ @BlackRock |
8:00~ 打ち上げ @BlackRock |
8:00~ 打ち上げ @BlackRock |
9:30~14:00 朝食MTG(結果報告会) @Bruno’s |
| 15:00~ 会場設営 @BlackRock |
20:00~ Night Launch @BlackRock |
今年度もARLISSでは、(1)カムバックコンペティション、(2)ミッションコンペティションの2つのコンペが催されました。 去年までと違い、カムバックコンペティションでは、ゴールに正確にたどり着けたかを競う”Highest Precision Award”と制御開始地点からゴール地点までの平均速度の大きさを競う”Highest Velocity Award”に賞が増えました。 またミッションコンペティションもこれまでの参加者全員投票型の”Coolest CanSst Mission of the Year” とUNISEC教員の協議によって決定する”UNISEC Award”の2種類に増えました。
大会詳細
9/7(日)
【事前打ち合わせ・技術交流会】
ARLISS参加チームが正午にBruno’s Coutry Clubという射場の最寄りのホテルに集合し、安全管理に関する事前打ち合わせを行い、その後技術交流会を開催しました。 今年度は日本以外の国のチームも技術交流会に参加したため、発表は英語で行われました。 技術交流会では、各チームが自己紹介をした後、開発したCanSatの魅力やミッションの見どころについて発表しました。 発表後、参加者は自由にCanSatについて語り合い大いに盛り上がりました。





事前打ち合わせ、技術交流会の様子
技術交流会の後、全員で射場に移動し、参加者が使用するテントの設営を行いました。 設営と併行してゴールポイント設置およびゴール地点のGPS座標取得も行いました。 今年度の砂漠は車の轍が目立ち、ローバータイプにとって比較的難しいコンディションのように感じられました。


会場設営の様子
9/8(月)~11(木)
8日の午前8時に射点に集合し、開会式を開催しました。 開会式ではまず、和歌山大学の秋山先生よりご挨拶を頂き、AeroPac代表のKenさんより開会のご挨拶と諸注意に関するお話を頂きました。 開会式の終わりには参加者とAeroPacメンバーで集合写真を撮りました。 1日目の砂漠は快晴で、風も弱く打ち上げには絶好の日和で、15周年の初日を飾るのにふさわしい天気でした。

開会式の様子と集合写真
開会式が終了した後、11日(木)まで、打ち上げの用意が出きたチームから順に打ち上げを行いました。 初日は11チーム、多くのCanSatを打ち上げることができ、各チームの運用に関する手際の良さが目立ちました。 しかし、2日目は、強風と視界不良により打ち上げチームは2チームにとどまりました。 3日目と4日目は天候が回復し次々とロケットが打ち上げられ、無線では各チームのCanSat探索の状況が飛び交いました。
Aeropacの方々や教員の皆様のご協力のもと、いくつかの小さなトラブルはあったもののそれらは適切に対処され、大会期間中参加者は怪我もなく安全に過ごすことが出来ました。 大会期間中にはFacebookページのCanSat UNSECアカウントから開催状況が毎日更新されました。 現在も、今年度の写真や報告が掲載されているので、ご興味のある方はぜひともご覧になってください。

各チームは打ち上げ準備を済ませた後に、運営テントでレギュレーションの最終確認を行います




打ち上げ前には各チームは機体と共に記念撮影を行います

CanSatを載せたロケットが参加者の手で次々にランチャーへと運ばれます。

2日目は視界不良で、打ち上げ数は2チームでした

高校生チーム(法政二高)も参戦しました
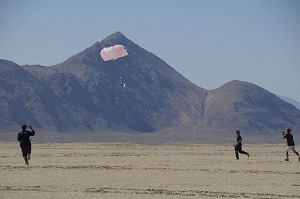

打ち上げたCanSatを捜索し、ミッションの行方を見守ります


砂漠での開発風景


ランチャーでのロケット取り付け作業が終われば記念撮影です

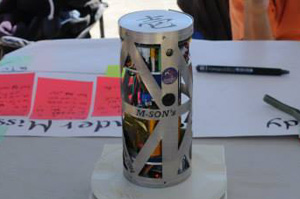


大会参加者のCanSat
大会結果
9月12日には各チームが大会の成果を報告しました。 各チーム5分間、ミッションが成功したチームもそうでなかったチームも自分たちの成果を熱心に発表しました。 各コンペティションの結果は以下で掲載します。受賞したチームはその場で表彰が行われました。
最後に、ARLISS2014に関わってくださった皆様、特にAeropacの皆様や国内でレビュー会等の審査をしてくださった教員の方々には感謝の気持ちで一杯です。 そしてARLISS運営チームと参加学生の皆様のご協力と熱意があってこそ、今年度も無事にイベントを終了することができました。 重ね重ね、御礼申し上げます。



朝食ミーティングの様子
各種コンペティション結果
概要
今年からはComeback CompetitionをHighest Precision Award, Highest Velocity Awardに細分化し,さらにUNISEC教員の視点から選出するUNISEC Awardを新たに設けました.
| 大学名 | チーム名 | Result | |
|---|---|---|---|
| 1st Flight | 2nd Flight | ||
| ○:制御履歴が認められた記録 ×:制御履歴が認められなかった -:制御履歴の提出なし | |||
| 東京大学 | UT-alpha | – | ○5,006m |
| 首都大学東京 | TMU☆CAN | – | ○2,915m |
| 電気通信大学 | MINERVA | – | ○360m |
| 電気通信大学 | CASSY | – | – |
| 慶應義塾大学 | Wolve’Z | – | – |
| 首都大学東京 | TMR | – | ○2,906m |
| 東京電機大学 | TDU space project | – | – |
| 東京理科大学 | So-seki | ○3,603m | – |
| 東京大学 | Astro Penguin | – | ○1,782m |
| 九州工業大学 | KITCATS | ○2,861m | – |
| 九州工業大学 | KINGS | ○3,787m | × |
| 芝浦工業大学 | Albatross | – | – |
| 芝浦工業大学 | アインス | – | – |
| 東京大学 | Gecko | – | – |
| 愛知工科大学 | STELA-I | ○2,171m | – |
| ソウル大学 | SNUSAT | – | – |
| ペルー大学 | CANSAT PERU | – | – |
Highest Velocity AwardではFly-back方式を採用した九州工業大学KINGSが2位以下を大きく引き離しての1位でした.
| 順位 | チーム | 記録 | 方式 |
|---|---|---|---|
| 1 | 九州工業大学 KINGS | 9.500m/s | Fly |
| 2 | 電気通信大学 MINERVA | 1.220m/s | Run |
| 3 | 首都大学東京 TMU☆CAN | 1.056m/s | Run |
| 4 | 首都大学東京 TMR | 1.000m/s | Run |
| 5 | 東京大学 Astro Penguin | 0.497m/s | Run |
| 6 | 九州工業大学 KITCATS | 0.306m/s | Run |
| 7 | 東京大学 UT-alpha | 0.214m/s | Run |
| 8 | 東京理科大学 So-seki | 0.141m/s | Run |
| 9 | 愛知工科大学 STELA-I | 0.000709m/s | Run |
| 順位 | チーム | 票数 |
|---|---|---|
| 1 | 電気通信大学 CASSY | 8 |
| 2 | 電気通信大学 MINERVA | 6 |
| 3 | ソウル大学 SNUSAT | 3 |
| 3 | 東京科学大学 Tether Brothers | 3 |
| 3 | 東京科学大学 M-son’s | 3 |
| チーム |
|---|
| 慶應義塾大学 Wolve’Z |
| 団体名 | 発表資料 |
|---|---|
| 九州工業大学 KINGS |  |
| 慶應義塾大学 Wolve’Z | |
| 芝浦工業大学 Albatross | |
| 芝浦工業大学 アインス | |
| 首都大学東京 TMU☆CAN | |
| 電気通信大学 MINERVA | |
| 東京科学大学 Helios | |
| 東京科学大学 M-SON’s | |
| 東京科学大学 Tether Brothers | |
| 東京理科大学 So-seki | |
| ペルー大学 PERU TEAM | |


